 |
| Quantity: | |
|---|---|
KYWK76-12
Keya
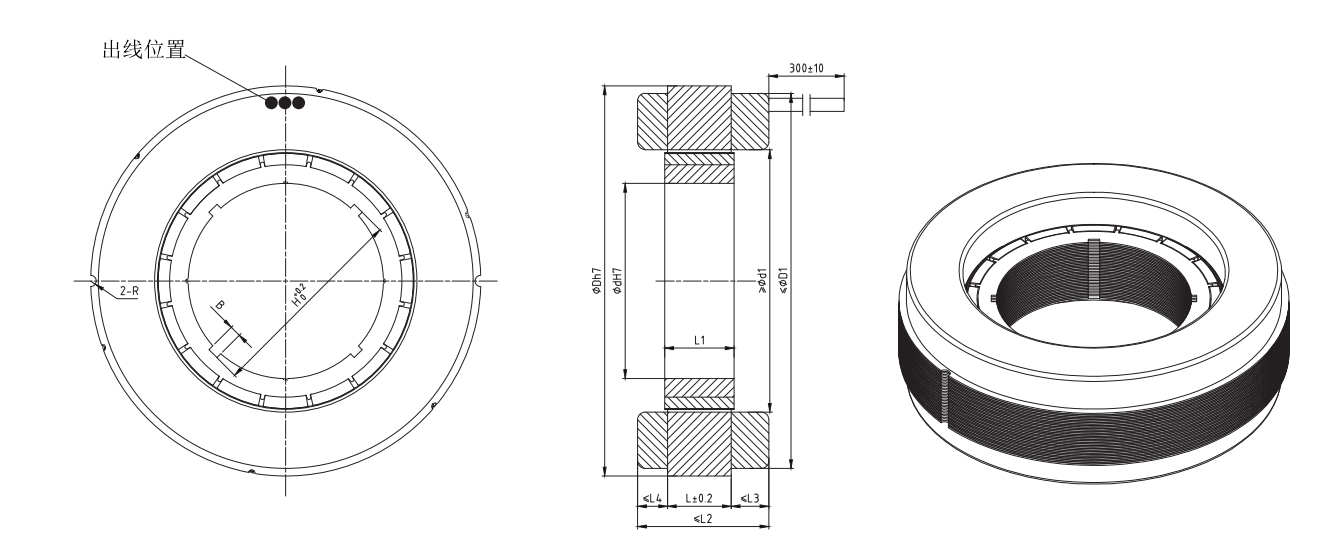
Frameless Motor Design Frameless Rotary Motors Robotic Hand Using Servo Motors
Product Overview
Rated Voltage: DC24V-96V
Advantage:High efficiency, high precision, good dynamic performance.
Small size, compact structure, light weight, and low inertia.
Permanent magnet synchronous motor, maintenance-free.
Application:robot joints, collaborative arms, medical robots,
pan-tilt-zoom and aerospace etc..
")
Parameters
| Parameters | |||
| Product model | KYWK76-12 | KYWK91-10 | KYWK104-17 |
| Rated voltage | DC 48V | ||
| Rated power | 220W | 350W | 600W |
| Rated current | 6.4A | 10A | 17.2A |
| Rated speed | 3000RPM | 3000RPM | 2500RPM |
| Rated torque | 0.7N.m | 1.1N.m | 2.3N.m |
| No-load speed | 4000RPM | 4000RPM | 3250RPM |
| Instantaneous maximum current | 16A | 25A | 44A |
| Instantaneous maximum torque | 1.75N·m | 2.75N·m | 5.75N.m |
| Number of poles | 16 | ||
| Insulation level | F grade | ||
| Weight | 0.35kg | 0.48kg | 0.85kg |
Application
It has been widely used for robot joints, collaborative arms, medical robots, pan-tilt-zoom and aerospace etc..


















